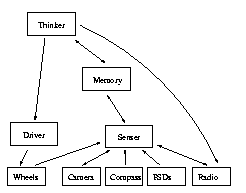
The 'thinker' do the path planning based on info in memory, and choose if it should go for the ball, communicate with the other players or move.
The 'driver' takes a list of positions and final heading (a path), and drives this path as instructed by the 'thinker'.
The 'memory' receives info from the 'senser' and store and predict future state in the game.
The 'senser' collects sensor information, process it and passes more high level information on to the memory module.